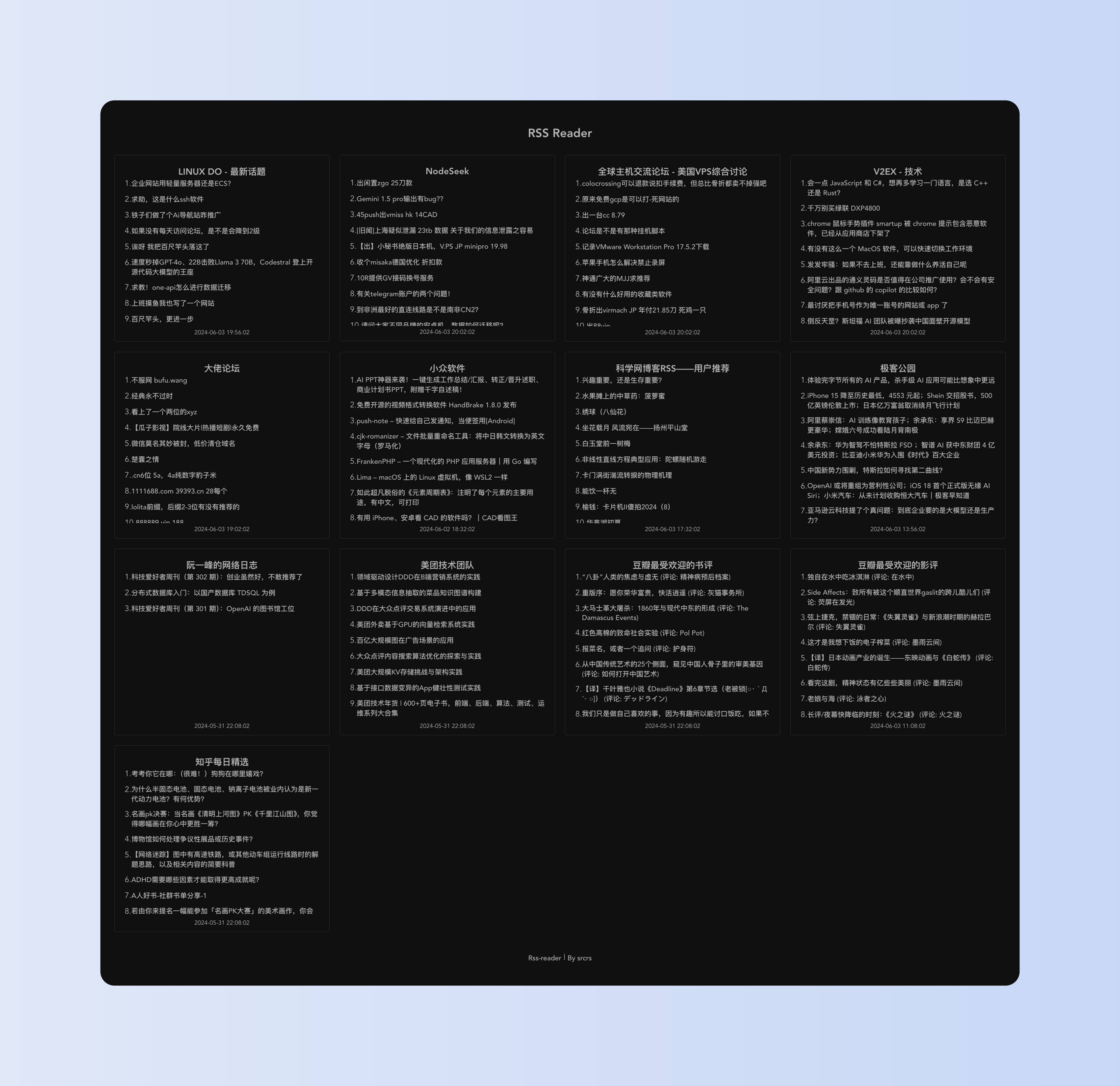
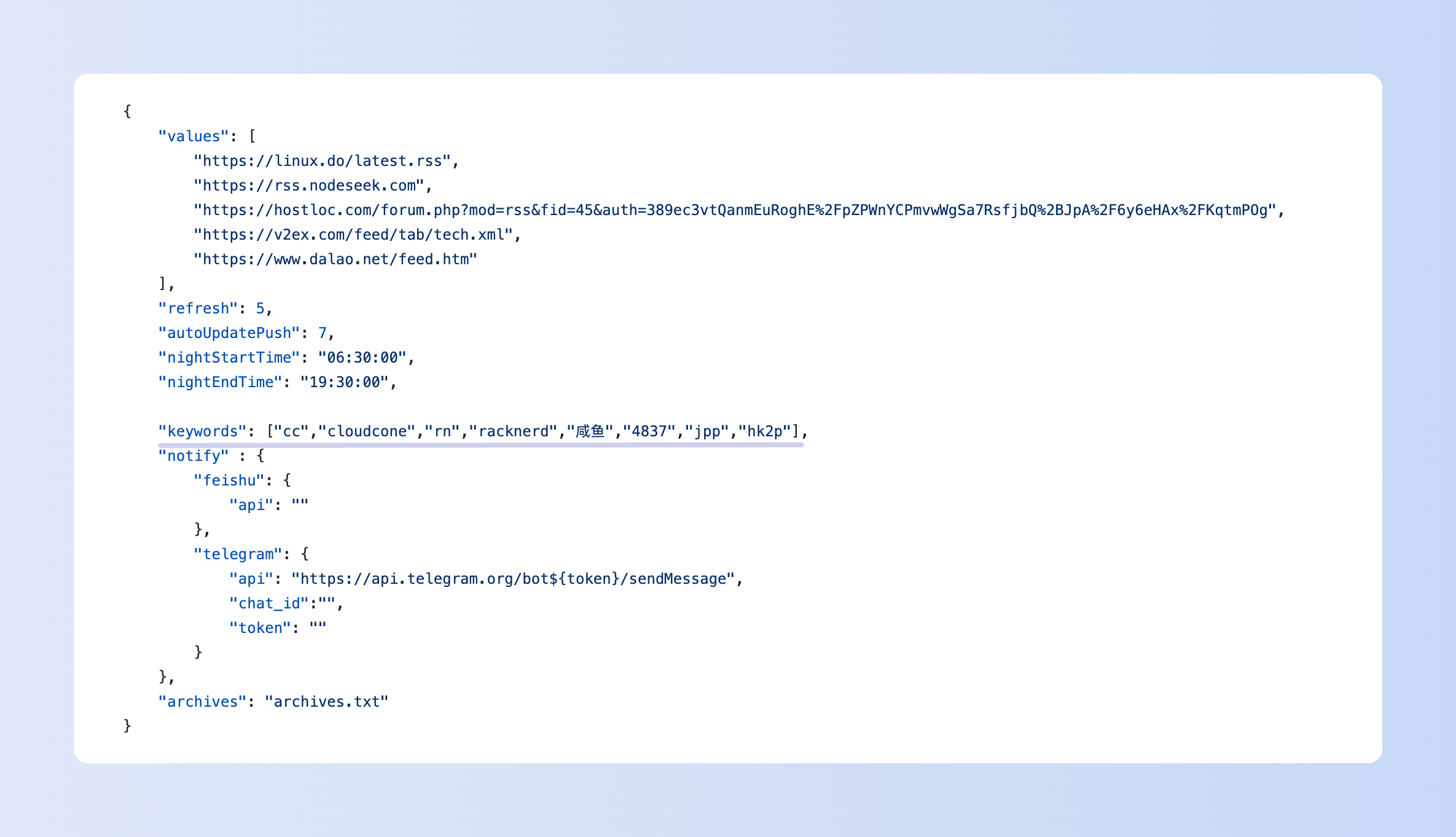
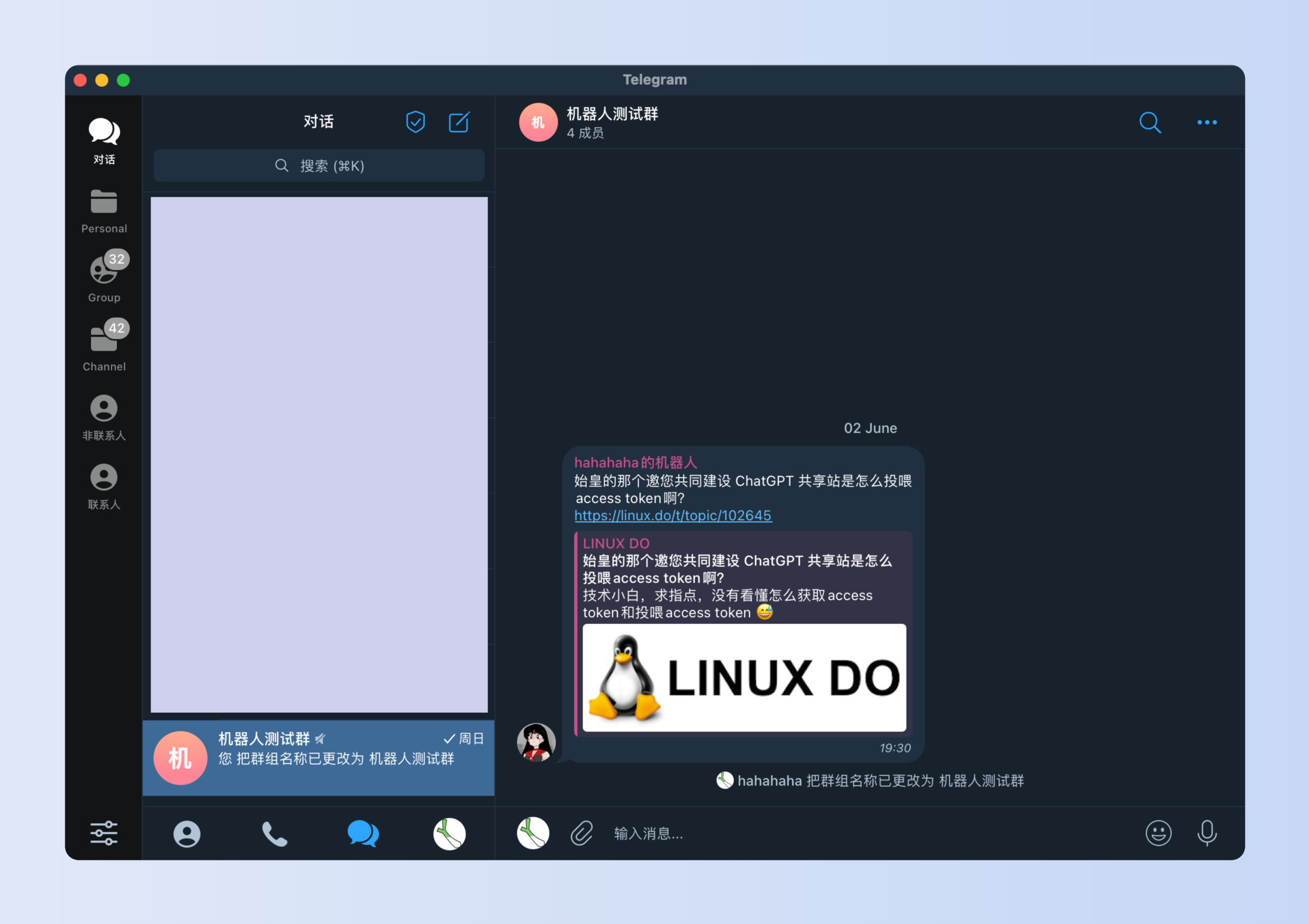
项目地址:https://github.com/huhengbo/rss-reader/tree/main 代码糟烂,想喷可喷,但我难受 项目都是 Go 实现,以及功能并不复杂,对系统的资源占用极其微小,可放心食用,已提供 docker-compose 方式,可以一键完成安装启动运行,注意 docker-compose.yml 文件中的端口设定默认是9898 ,你可以设置成8787 部署前请先配置,配置都在 config.json 中修改,使用前请先去 config.json 中增加自己飞书机器人的webhook地址 或 Telegram 的 token 和 chat_id,注意⚠️ TG api 后面的地址不要改! https://api.telegram.org/bot${token}/sendMessage ,也就是这个${token}保持原样别动 config.json 中的 refresh 单位为分钟,表示多少分钟请求一次所需的 rss 订阅源 TG机器人创建和权限赋予教程请看 https://www.telegramhcn.com/article/161.html 实时展示rss订阅最新消息。 打包后镜像大小仅有约20MB,通过docker实现一键部署 支持自定义配置页面数据自动刷新 响应式布局,能够兼容不同的屏幕大小 良好的SEO,首次加载使用模版引擎快速展示页面内容 支持添加多个RSS订阅链接 简洁的页面布局,可以查看每个订阅链接最后更新时间 支持夜间模式 config.json配置文件支持热更新 在原作者基础上,进行二次开发,增加了识别关键词后,推送通知到飞书和Telegram(2024年6月2日) 项目
特性
食用效果

BT面板部署教程:首先安装bt插件
| 官方 |
配置config.json的时候记得重启docker或者重启下容器。保持config.json同步到容器里面参考如下网站
| 名称 | 说明 |
|---|---|
| values | rss订阅链接(必填) |
| refresh | rss订阅更新时间间隔,单位分钟(必填) |
| autoUpdatePush | 自动刷新间隔,默认为0,不开启。效果为前端每autoUpdatePush分钟自动更新页面信息,单位分钟(非必填) |
| nightStartTime | 日间开始时间 ,如 06:30:00 |
| nightEndTime | 日间结束时间,如 19:30:00 |

